



プラント自動巡回点検防爆ロボット EX ROVR “ASCENT” : 製品
プラント自動巡回点検防爆ロボット EX ROVR “ASCENT” : 製品
SHARE



この製品の取り扱い会社:
製品
EX ROVR "ASCENT"

- 高い走破性能を有し、階段昇降を含むマルチフロアを自律で移動。
- 可視カメラ、熱画像カメラ、ガス検知器、マイク等を搭載し、可視画像、熱画像、ガス濃度などのプラント情報を自動で取得。
防爆性能及びハードウェア仕様
- Zone1の危険場所に対応可能な防爆性能を有し、危険場所での非接触充電により高い稼働率を実現
- 高い走破性を有し、マルチフロア(46°の階段を自律で昇降)の自動巡回が可能
- ハンドアイカメラを搭載した6自由度マニピュレータを有し、計器類の画像を近接・正対して取得
- ガス検知器、マイクを搭載し、ガス濃度、音等のプラント情報の取得可能

防爆機能
様々な国の規制に対応 日本(Ex2018)、IECEx、ATEX
- ガスクラス:IIB+H2 T3 Gb
- 危険場所:Zone 1

| 防爆規格 | IECEx | ATEX | 日本(Ex2020(2018)) |
|---|---|---|---|
| 防爆性能 | Ex db ib pxb IIB+H2 T3 Gb | II 2G Ex db ib pxb IIB+H2 T3 Gb | Ex db pxb IIB+H2 T3 Gb |
| 型式認定合格番号 | IECEx TIIS 22.0002X | SCA 22 ATEX 140X | 第TC22783X号 |
ASCENTは、移動用のメインクローラ/サブクローラおよびマニピュレータ用モータを含む本体を1つの内圧防爆構造容器としています。
各部を駆動する内蔵バッテリは、リチウムイオン電池の制御部と電池部を共に耐圧防爆構造のケースに収納しています。ASCENTに装備されるLED照明、ガス検知器、可視監視カメラ、マイク&スピーカは独立した防爆仕様を備えています。

自動運転
複雑なプラント内を夜間でも安全に自動巡回
- LiDARによる3次元自己位置推定
- 障害物検知
- 階段昇降アルゴリズム

EX ROVR "ASCENT"のセットアップ手順
遠隔操作によりプラント内のマップ作成、経路設定を実施し、自動巡回をセットアップ。

- 手順1
- 操作機材、ロボット、ステーションを設置
- 手順2
- ロボットを遠隔操作して、巡回エリアのマップを作成

- 手順3
- ロボットを遠隔操作して、巡回シナリオ(巡回経路や画像取得等の作業)を作成・編集
- 手順4
- 巡回スケジュール(巡回開始時間や巡回シナリオの指示)を作成・管理

- 手順5
- 巡回実行 → スケジューラでシナリオが自動起動し、設定したシナリオに従って自動で移動し、可視画像・全天球画像や熱画像を取得(任意のタイミングで遠隔操作も可能)


高い機動性
狭隘かつ複数フロアにまたがる複雑なプラント内を稼働
- 46°(基準最大)の階段昇降
- 狭い階段踊り場での旋回
- 防油堤の障害物乗り越え

ASCENTの走行性能
| 自動巡回時 | 遠隔操作時 | ||
|---|---|---|---|
| 傾斜 | 斜角の性状(摩擦係数など)による | ||
| 勾配(スロープ) | A参照 | 傾斜46°以下 | |
| 横勾配(バンク) | 水勾配以下(勾配1/50~1/100、角度に換算すると0.57°~1.15°) | 転倒せずに走行できる傾斜は20°以下 | |
| 階段 | 段の高さ 130mm~220mm 段の奥行き 210mm~310 mm 段の幅 900mm以上 傾斜についてはB参照 |
段の高さ 130mm~220 mm 段の奥行き 210mm~310mm 段の幅 900mm以上 傾斜46°以下 |
|
| 踊り場 | 下記の形状・寸法の踊り場を走行可能 U字型:最小寸法 幅1800mm × 奥行き 1000mm L字型:最小寸法 幅1000mm × 奥行き 1000mm I字型:最小寸法 幅900mm × 奥行き 900mm |
||
| 段差 | 高さ20cm以下(矩形断面であること) | 高さ40cm以下(形状による) | |
| 溝 | 幅15cm以内 | 幅30cm以下(形状による) | |
A:自動巡回時に走行可能な勾配(スロープ)

B:自動巡回時に走行可能な階段の傾斜

走行ルートの条件
ASCENTの外形寸法よりも狭い通路は走行できません。ASCENTの周囲に人が立つことができる程度のスペース(約900mm)を確保してください。


通路上を旋回させるときは、ASCENTの全長よりも余裕のある領域である必要があります。右図のように約900mmのスペースを確保してください。
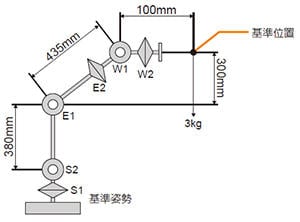
マニピュレータ
様々な姿勢で計器に近接・正対して画像取得、ハンドでの簡易作業
- 6自由度防爆マニピュレータ
- 対象物の形状に倣うハンド

| 駆動方式 | ACサーボモータによる電気サーボ駆動 |
|---|---|
| 動作自由度 | 6軸(ハンド軸を除く) |
| 軸構成 | ローテーション軸:3軸 ピボット軸:3軸 |
| 可動範囲 | リーチ:およそ球R1mの半ドーム面 |
| 最大速度(基準姿勢(注)における基準位置での水平・鉛直方向) | 約100mm/秒 |
| 可搬重量(基準姿勢(注)における発生力) | 約3kg(ハンド含む) |
| 動作制御 | 各軸制御及び位置姿勢制御 |
| 異常時対応 | エラー処理 |
| 駆動用原動機の定格出力 | 50W |
- 基準姿勢は下図のとおり。

自動充電
危険場所で長時間にわたり連続稼働
- 危険場所での大容量非接触自動給電
- 2時間満充電で最大2時間稼働の高い稼働率

主な外形寸法(mm)
本体質量:70 kg

データ蓄積
様々な場所から点検計画を設定、点検データを確認
- お手持ちのウェブブラウザで点検メニューとスケジュールの設定
- クラウド上で点検データ蓄積・分析

- 4G/LTEを介し、ロボットの管理、遠隔操作を実施
- ロボットが取得したプラント情報はクラウドに保存し、履歴を管理

お問い合わせ
下記、お問い合わせフォームもしくは、メールアドレスへ送信ください。
